Программист C, Golang, Dart
Миниробот для нанесения рисунка аэрографом на поверхности плитки
Добавлено
21 июн 2018 в 09:34
Embedded AVR, ASM, С
Введение
С появлением новых требований покупателей к разнообразию дизайна облицовочной,
гипсовой плитки возникла необходимость автоматизации процесса нанесения рисунков на
поверхность. В процессе изготовления плитки необходимо грунтовать поверхность лаком,
затем краскораспылителем нанести тонкий фоновый слой. Аэрографом наносится
выбранный из каталога рисунок.
В настоящем проекте предложено решение на основе микроконтроллеров серии AVR,
которые обеспечивают управление исполнительными механизмами и цикл нанесения
рисунка на поверхность плитки.
Эту задачу целесообразно решать с использованием технологии автоматов. Для ее
алгоритмизации и программирования оказалось удобным применить SWITCH-технологию
[1].
Настоящая работа призвана автоматизировать этап нанесения рисунка на поверхность
плитки, уменьшить брак при производстве и увеличить производительность производства.
1. Постановка задачи
Целью настоящего проекта является изготовление макета миниробота для нанесения
рисунка аэрографом на поверхности облицовочной плитки.
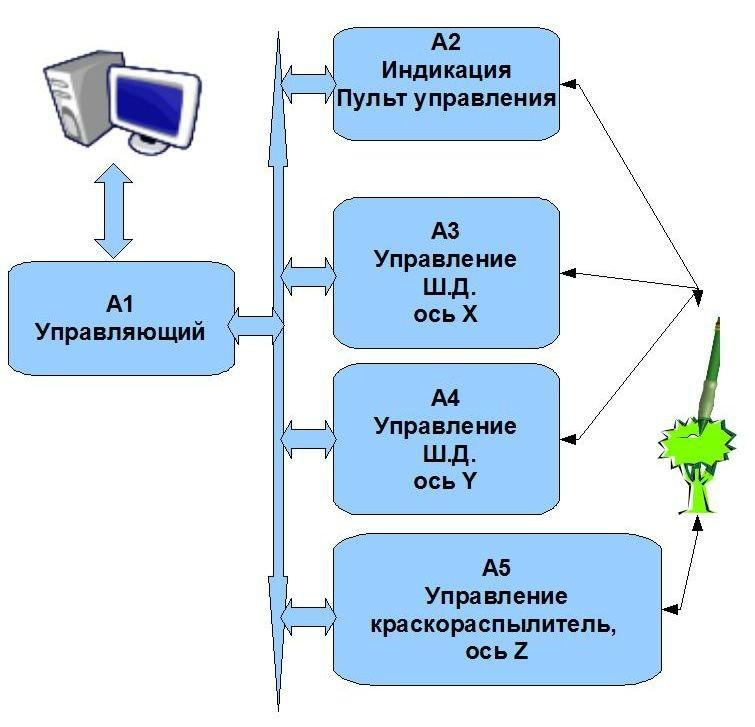
Миниробот состоит из следующих частей:
а) Исполнительный механизм для перемещения аэрографа шаговыми двигателями;
б) Модули управления шаговыми двигателями по осям X, Y, Z;
в) Устройство управления подачей краски для аэрографа;
г) Модуль управления, который формирует задания для остальных модулей (шаговые
д) двигатели, индикации, пульт управления оператором). Модуль управления
подключается к персональному компьютеру через интерфейс RS-232C.
Рис. 1 Структурная схема миниробота
Миниробот состоит из связанных автоматов с явным выделением состояний.
Создается схема связи и граф переходов автоматов.
Алгоритмы автоматов реализованы на языках программирования ASM, C
микроконтроллера AVR. На ассемблеры реализованы функции, которые критичны к времени
выполнения. Язык программирования С позволяет ускорить проектирование, отладку
программных модулей автоматов.
Для макетирования и отладки программы использовался набор AVR Starter Kit
STK500.
Введение
С появлением новых требований покупателей к разнообразию дизайна облицовочной,
гипсовой плитки возникла необходимость автоматизации процесса нанесения рисунков на
поверхность. В процессе изготовления плитки необходимо грунтовать поверхность лаком,
затем краскораспылителем нанести тонкий фоновый слой. Аэрографом наносится
выбранный из каталога рисунок.
В настоящем проекте предложено решение на основе микроконтроллеров серии AVR,
которые обеспечивают управление исполнительными механизмами и цикл нанесения
рисунка на поверхность плитки.
Эту задачу целесообразно решать с использованием технологии автоматов. Для ее
алгоритмизации и программирования оказалось удобным применить SWITCH-технологию
[1].
Настоящая работа призвана автоматизировать этап нанесения рисунка на поверхность
плитки, уменьшить брак при производстве и увеличить производительность производства.
1. Постановка задачи
Целью настоящего проекта является изготовление макета миниробота для нанесения
рисунка аэрографом на поверхности облицовочной плитки.
Миниробот состоит из следующих частей:
а) Исполнительный механизм для перемещения аэрографа шаговыми двигателями;
б) Модули управления шаговыми двигателями по осям X, Y, Z;
в) Устройство управления подачей краски для аэрографа;
г) Модуль управления, который формирует задания для остальных модулей (шаговые
д) двигатели, индикации, пульт управления оператором). Модуль управления
подключается к персональному компьютеру через интерфейс RS-232C.
Рис. 1 Структурная схема миниробота
Миниробот состоит из связанных автоматов с явным выделением состояний.
Создается схема связи и граф переходов автоматов.
Алгоритмы автоматов реализованы на языках программирования ASM, C
микроконтроллера AVR. На ассемблеры реализованы функции, которые критичны к времени
выполнения. Язык программирования С позволяет ускорить проектирование, отладку
программных модулей автоматов.
Для макетирования и отладки программы использовался набор AVR Starter Kit
STK500.