Мы с важной новостью: с 28 февраля 2025 года сервис Хабр Фриланс прекратит свою работу.
Купить услуги можно до 28 февраля 2025, но пополнить баланс уже нельзя. Если на вашем счете остались средства, вы можете потратить их на небольшие услуги — служба поддержки готова поделиться бонусами, на случай, если средств немного не хватает.

Андроид разработка на kotlin /
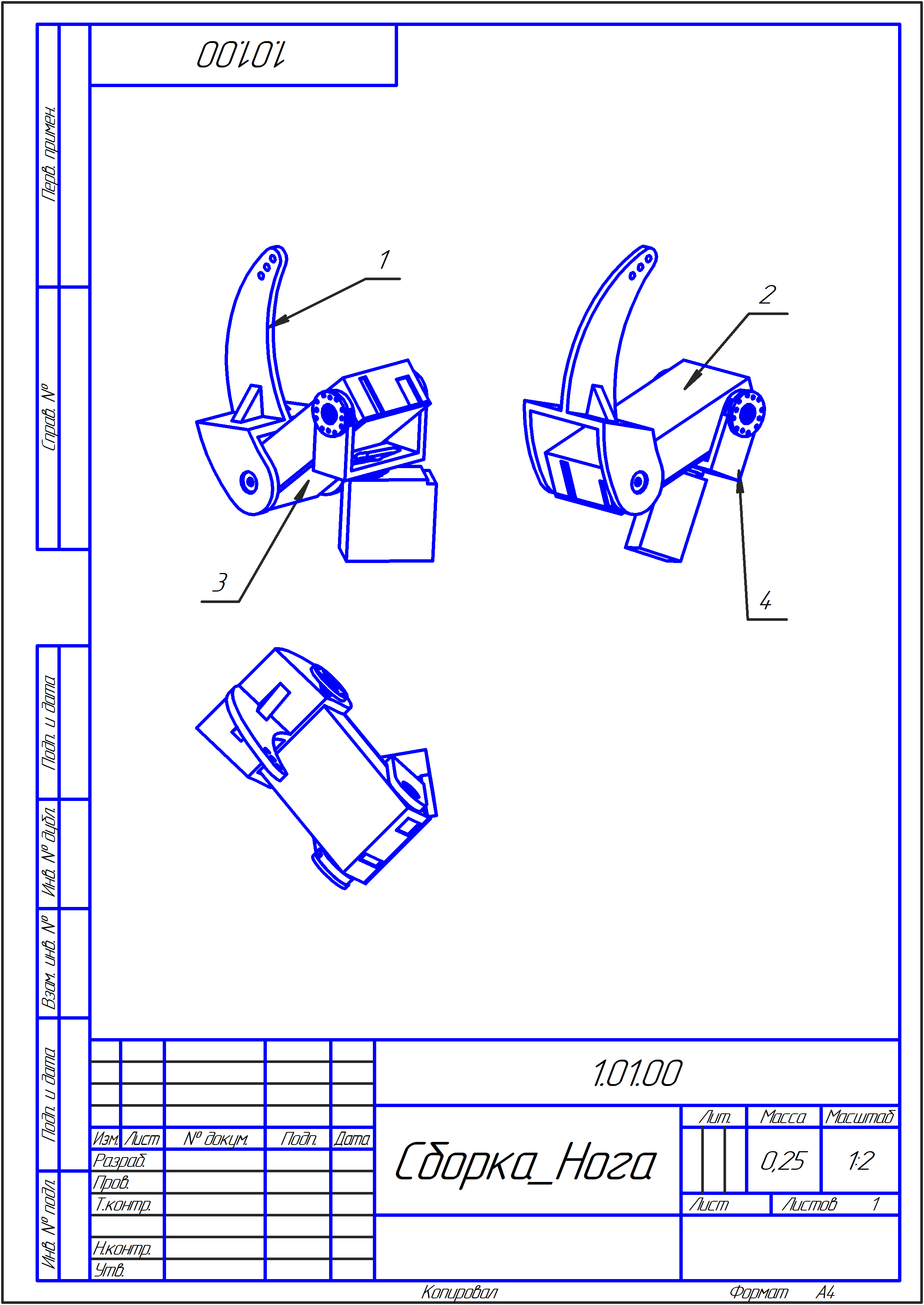
Робот-Сборщик
Добавлено
11 мар 2022 в 17:50
В проекте реализована работа над созданием системы управления и самого робота-сборщика, который реализует сбор и перемещение пластмассового мусора с окружающей территории в указанную точку. В технической части работы проводится анализ схожих изделий, осуществляется создание прототипа посредством 3D-моделирования и печати на 3D-принтере. Система управления состоит из взаимодействия между сервоприводами и Arduino, камерой и Raspberry. Важной частью проекта является разработка нейронной сети, созданной с помощью приложения Lobe и тренировочных данных, полученных из созданного сайта и телеграмм-бота. Продуктами работы стали технический прототипы и подробная техническая документация для создания опорно-двигательной системы робота и граббер-захвата, а также работающая схема взаимодействия камеры и сервоприводов. Целевой аудиторией проекта являются начинающие программисты, предприниматели в области автоматизации, уборщики мусора, жилищные кооперативы, земельные собственники.